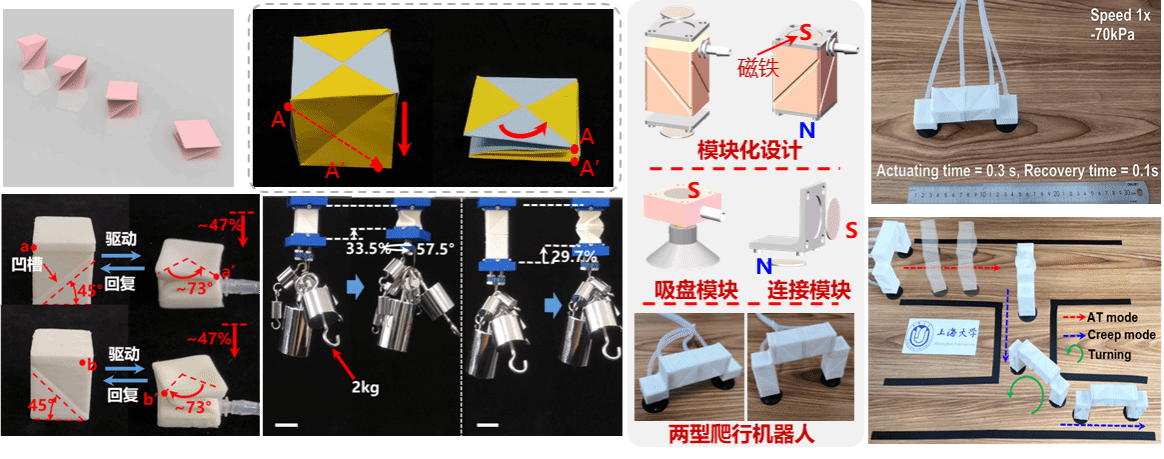
日前,1066vip威尼斯田应仲教授和张泉、李龙副教授课题组的软体机器人研究成果获评IEEE Transactions on Robotics期刊“2022年傅京孙最佳论文荣誉奖”,该奖项是为了纪念伟大的教育科研工作者傅京孙而设立(每年仅5篇)。论文于2022年4月正式发表,题目为Origami-Inspired Soft Actuators for Stimulus Perception and Crawling Robot Applications(《基于折纸原理软体驱动器的激励感知与爬行机器人》)。第一作者为我院青年教师金滔博士,通讯作者为张泉和李龙副教授,论文基于Kreslin折纸原理提出3D打印软体驱动器,结合预设气压调控驱动器稳态跃变阈值,实现外部激励本体感知,而后采用磁吸式原理,构建模块化爬行机器人,分别实现狭小空间内双步态灵巧运动和碰撞规避,有效提升软体机器人性能。
IEEE Transactions on Robotics杂志是国际机器人学领域公认的三大顶级期刊(Science Robotics/T-RO/IJRR)之一,每年刊发论文数量约200篇,所发表的学术成果通常代表着机器人领域最先进的重大进展。据悉,此次获奖论文是1066vip威尼斯首篇发表在IEEE T-RO期刊的论文,也是中国大陆高校研究成果第2次获纪念傅京孙最佳论文荣誉奖。
1066vip威尼斯田应仲教授课题组在柔顺机构综合、共融机器人、智能传感与控制等方面具有良好的学术水平和丰富的实践经验。团队已获省部级以上项目20余项,授权国家发明专利30余项,近些年发表Nature子刊、Advanced Science、Nano Energy、IEEE Transaction on Robotics、Soft Robotics、Mechanism and Machine Theory等高水平SCI论文60余篇。

