近日,1066vip威尼斯张泉教授团队联合国内外合作者,在Science子刊《Science Robotics》(机器人领域排名第一)以共同通讯作者发表题为“Human-scale Navigation of Magnetic Microrobots in Hepatic Arteries”的研究工作。
利用外部驱动源在血液中导航微纳带药机器人从而提高药物传递效率,在肿瘤靶向治疗中具有巨大潜力。然而,目前的外部驱动源难以在人体尺度(大于70 厘米直径范围内)保持足够的场强度以实现微纳机器人的导航操作。带药机器人通常采用两种方法来提高导航成功率:(1)使用更大的机器人和(2)减小机器人与驱动器之间的距离。更大的机器人具有提供更大物理场力的优势,但其尺寸受限于复杂的血管结构和人体兼容性的要求;减小机器人与驱动源之间的距离可以实现微纳机器人在血液中的快速无束缚导航,但随着操控距离的增大,外部驱动源场强(例如磁场)会迅速衰减(无法应用于深层动脉),因此现有的微纳米机器人操控方法通常局限于大型动物(如猪)的四肢/头部等浅层器官,或小型动物(如小鼠和兔子)。


论文在Science Robotics首页进行大篇幅报道
在此背景下,研究组提出了用于预测血管内微型机器人相对于患者的最佳重力位置导航算法,并结合临床磁共振成像(MRI)的磁场梯度,有效提高了磁性微型机器人在大型活体(猪)的肝脏靶向效率。研发了专用微型机器人注射器、高精度MRI兼容压电血流控制系统,基于临床MRI成功地将磁性微型机器人注入到12头活猪(每头猪大约注射2000个,每个磁性微型机器人200微米)的肝动脉,并实现目标肝叶地导航,在通过多分支的肝动脉血管后,与对照组(n=4)相比,达到四个不同目标肝叶的磁性微型机器人数量在导航组中(n=8)增加了 1.7 至 2.6 倍。对19例肝细胞癌(HCC)患者进行仿真表明,所提出的技术可以满足HCC患者肝动脉栓塞的需求。研究组提出的技术为基于外部驱动源的微纳米机器人在人类尺度上的导航提供了可选择的方向。
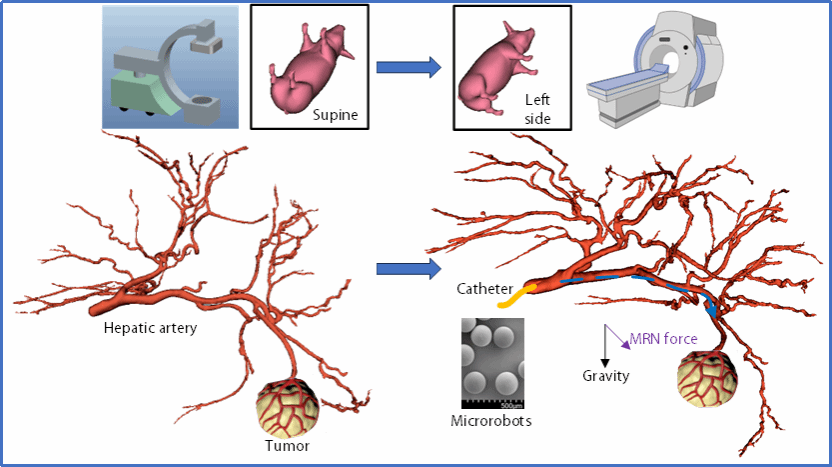
论文研究思路及实验验证
1066vip威尼斯机自学院/人工智能研究院为论文的共同通讯单位,张泉教授为共同通讯作者;蒙特利尔大学Ning Li博士为论文第一作者,主要合作团队还包括蒙特利尔大学Sylvain院士团队及蒙特利尔大学中心医院Gilles医生团队等。论文受到了国家自然科学基金,上海市青年科技启明星计划,上海市科委高端外专计划等经费支持。
论文地址:https://www.science.org/doi/10.1126/scirobotics.adh8702

