马立
研究员,博导
精密机械工程系教师
联系方式:malian@shu.edu.cn、66130916
l 个人简介
马立,1066vip威尼斯机自学院研究员、博士生导师,中国机械工程学会生产工程分会精密装配技术专业委员会委员。
从事机器人微操作技术、微/纳米定位技术、生物制造、智能制造等方面的研究,建立了激光陀螺调腔及光束微精密耦合系统,提高了精密装配的质量和效率;主持及参与科研项目20余项;发表科研论文70余篇;授权发明专利19项;登记软件著作权2项;获项目应用证明2项。
l 主要研究领域
1、机器人微操作技术
2、微/纳米定位技术
3、生物制造
4、智能制造
l 代表性成果
在《机械工程学报》、《仪器仪表学报》、《物理学报》、《光学精密工程》、《Sensors》、《Nanomaterials》、《Journal of Biomaterials Applications》等国内外学术期刊发表SCI/EI论文近50篇,授权发明专利19项,登记软件著作权2项。
▪ 论文
1. 径向压缩碳纳米管的电子输运性质. 物理学报. 2022,71(2):027301.
2. Electrical conductivity of multiwall carbon nanotube bundle contacting with metal electrodes by nano manipulators inside SEM. Nanomaterials. 2021, 11(5):1290.
3. Biofabrication of controllable tubular calcium alginate hydrogel for tissue engineering. Journal of Materials Research. 2021, 36(7): 1487-1495.
4. 多壁碳纳米管与金属表面间接触行为的分子动力学模拟. 物理学报. 2021, 70(10): 106101.
5. 基于电沉积原理的管状海藻酸钙水凝胶可控制备. 高分子材料科学与工程. 2020, 36(9):97-104.
6. 激光陀螺光束精密耦合方法与实验研究. 中国激光. 2020,47(6): 0601009.
7. 碳纳米管的可控长度拾取及导电性分析. 物理学报. 2020, 69(6): 068801.
8. 基于扫描电子显微镜的碳纳米管拾取操作方法研究. 物理学报. 2018, 67(13): 136801.
9. 微小光学器件装配系统与实验研究. 光学精密工程. 2018, 26(6): 1462-1469.
10. Visual Servoing-Based Nanorobotic System for Automated Electrical Characterization of Nanotubes inside SEM. Sensors. 2018, 18(4): 1137.
11. 基于等高线的染色体高度曲线提取方法. 华南理工大学学报. 2017, 45(11): 100-105.
12. Shape-controlled fabrication of cell-laden calcium alginate-PLL hydrogel microcapsules by electrodeposition on microelectrode. Journal of Biomaterials Applications. 2017, 32 (4): 504-510.
13. Friction Identification and Compensation Design for Precision Positioning. Advanced in Manufacturing. 2017, 5(2): 120-129.
14. 3-PRR平面三自由度纳米定位平台的设计. 光学精密工程. 2017, 25(7): 1866-1873.
15. Modeling and verification of a piezoelectric frequency-up-conversion energy harvesting system. Microsystem Technologies. 2017, 23(7): 2459-2466.
16. 激光陀螺合光装配中信号的稳健高斯滤波方法. 中国激光. 2014, 41(10):1002003-1-6.
17. Multi-Sensor Control for Precise Assembly of Optical Components. Chinese Journal of Aeronautics. 2014, 27(3): 613-621.
18. 柔性铰链微定位平台的设计. 光学精密工程. 2014,22(2): 338-345.
19. 倾斜接触式调腔方法及实验研究. 机械工程学报. 2014, 50(1):10-17.
20. A Pose Measurement System for Optical Precision Operation. Sensor Letters. 2011, 9(5): 1957-1961.
21. 基于LVDT的光学器件相对位姿检测方法. 仪器仪表学报. 2011, 32(10): 2324-2329.
22. 面向光学精密装配的微操作机器人. 机械工程学报. 2009, 45(2): 280-287.
23. 二维微动工作台分析及其优化设计方法. 机械工程学报. 2006, 42(5): 26-30.
24. 三维纳米级微动工作台的设计与分析. 光学精密工程. 2006, 14(6): 1017-1024.
▪ 获奖
第五届中国科协期刊优秀学术论文
光学精密工程期刊2014-2015年度优秀作者
2021年1066vip威尼斯机自学院“机自学者”
▪ 发明专利
1. 靶定位六自由度串联机器人. 中国发明专利. (专利号: ZL 201010152405.9,授权时间: 2011-10-26).
2. 倾斜接触式激光陀螺调腔机构和方法. 中国发明专利. (专利号: ZL 201010561345.6,授权时间: 2012-05-02).
3. 基于柔性放大原理的压电驱动尺蠖式定位工作台. 中国发明专利. (专利号:ZL 201310170921.8,授权时间: 2016-01-20).
4. 机械抖动激光陀螺合光调整系统. 中国发明专利. (专利号:ZL 201310432546.X,授权时间: 2016-02-17).
5. 机械抖动激光陀螺合光机构. 中国发明专利. (专利号:ZL 201310432550.6,授权时间: 2016-02-17).
6. 基于视觉检测的激光陀螺自动合光装配系统. 中国发明专利. (专利号: ZL 201510553899.4,授权日期:2019-02-01).
7. 一种用于激光陀螺合光装配的精确点胶定位装置. 中国发明专利(专利号:ZL 201610639217.6,授权日期:2019-03-29).
8. 一种大行程步进缝制系统. 中国发明专利(申请号号:202110069437.0,申请日: 2021年1月19日)
9. 一种缝纫用自动换料升降装置. 中国发明专利(申请号:202110760051.4,申请日: 2021年7月6日)
10. 一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法. 中国发明专利(申请号:202210171744.4,申请日: 2022年2月24日)
▪ 软件著作权
1. 生产线自动装配软件V1.0(登记号:2021SR0265880,登记日期:2021年02月20日)
2. 钣金生产线调度系统V1.0(登记号:2021SR1934175,登记日期:2021年11月29日)
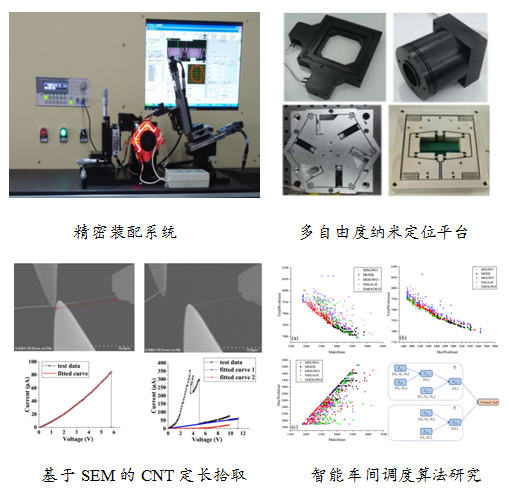
▪ 成果展示
l 科研项目
1. 国家重点研发计划课题:柔性化钣金智能制造管控技术,2019.6-2022.5,主持;
2. 国家自然科学基金面上项目:激光陀螺光束微精密耦合机理与协调控制方法研究,2016.1-2019.12,主持;
3. 国家自然科学基金青年基金项目:方形激光陀螺自动调腔技术及方法研究,2010.1-2012.12,主持;
4. 上海市自然科学基金:激光陀螺光束微精密耦合机理与实验研究,2013.7-2016.6,主持;
5. 企事业单位委托项目:激光陀螺自动合光系统,2011.10-2012.12,主持;
6. 企事业单位委托项目:高精度精密定位平台,2014.1-2014.12,主持;
7. 企事业单位委托项目:南洋 IoT 管理平台,2019.1-2019.12,主持;
8. 企事业单位委托项目:显微视觉测量技术开发,2020.12-2021.11,主持;
9. 企事业单位委托项目:神光Ⅱ装置升级工程靶场系统组件研制,2008.1-2012.12,参与;
10. 企事业单位委托项目:大尺寸汽车安全气囊自动化智能生产线研制,2021.3-2023.5;参与。

