窗体顶端

李龙
副教授,博导
联系方式: lil@shu.edu.cn
l 个人简介
李龙,1066vip威尼斯机自学院博士生导师,本硕博就读于哈尔滨工业大学机器人与系统国家重点实验室,师从结构机构领域著名专家邓宗全院士。长期从事智能结构与感知、柔性/软体机器人等方面的研究。在柔性/软体机器人创新构型、驱动感知以及智能控制等方面取得系列成果,攻克了基于摩擦电(Triboelectric Nanogenerator,TENG)的机器人柔性感知、线驱连续体机器人解耦构型、柔性折纸模块化机器人以及变刚度控制等关键技术,科研成果支撑多个航天预研重点发展方向。主持国家自然科学基金、国家国防科技工业局国防基础科研计划、上海市科委创新行动计划、上海市自然科学基金、航天八院、五院多个预研项目。以第一/通讯作者(含共同)发表包括Nature子刊在内的高水平论文十余篇,引用百余次。现任上海机器人学会会员,上海机器人产业协会会员,Soft Robotics、Mechanism and Machine Theory、IEEE Robotics and Automation Letters、Smart Materials and Structures 等期刊审稿人,自然科学基金评审专家。
l 主要研究领域
1、智能结构与感知
2、柔性/软体机器人
3、摩擦纳米发电机(Triboelectric Nanogenerator,TENG)
l 代表性成果
▪ 代表性论文
1、Tao Jin#, Zhongda Sun#, Long Li#, Quan Zhang, Minglu Zhu, Zixuan Zhang, Guangjie Yuan, Tao Chen, Yingzhong Tian*, Xuyan Hou*, Chengkuo Lee*. Triboelectric nanogenerator sensors for soft robotics aiming at digital twin applications. Nature Communications, 2020, 11(1):5381.
2、Long Li, Fengmin Xie, Tianhong Wang, Guopeng Wang, Yingzhong Tian, Tao Jin*, Quan Zhang*. Stiffness-tunable soft gripper with soft-rigid hybrid sctuation for versatile manipulations. Soft Robotics, 2022, online, DOI: 10.1089/soro.2021.0025.
3、Xuyan Hou#, Minglu Zhu#, Lining Sun#, Tianxiang Ding, Zhiying Huang, Yuetian Shi, Yilin Su, Long Li*, Tao Chen*, Chengkuo Lee*. Scalable Self-attaching assembling Robotic Cluster System Enabled by Triboelectric Sensors for In-orbit Spacecraft Application. Nano Energy. 2022, 93:106894.
4、Quan Zhang#, Tao Jin#, Jianguo Cai#, Liang Xu, Tianyiyi He, Tianhong Wang, Yingzhong Tian, Long Li*, Yan Peng*, Chengkuo Lee*. Wearable triboelectric sensors enabled gait analysis and waist m otion capture for IoT-based smart healthcare applications. Advanced Scinece, 2022, 9(4): 2103694.
5、Quan Zhang#, Long Li#, Tianhong Wang#, Yichen Jiang, Yingzhong Tian, Tao Jin*, Tao Yue*, Chengkuo Lee*. Self-sustainable flow-velocity detection via electromagnetic/triboelectric hybrid generator aiming at IoT-based environment monitoring. Nano Energy. 2021, 90:106501.
6、Tao Jin, Long Li*, Tianhong Wang, Guopeng Wang, Jianguo Cai, Yingzhong Tian, Quan Zhang*. Origami-inspired soft actuators for stimulus perception and crawling robot applications. IEEE Transactions on Robotics. 2021, online, DOI:10.1109/TRO.2021.3096644.
7、Yinjun Zhao, Fengfeng Xi, Yingzhong Tian, Wenbin Wang, Long Li*, Design of a planar hyper-redundant lockable mechanism for shape morphing using a centralized actuation method. Mechanism and Machine Theory. 2021, 165:104439.
▪ 代表性专利
1、李龙,顾文俊,汪田鸿,金滔,张泉,田应仲. 一种软体机器人形触多模态自供能柔性感知系统. 202110700104.
2、李龙,纪红宇,汪田鸿,金滔,张泉,田应仲 . 一种基于折纸结构的摩擦电-电磁复合能量收集装置. 202110719531.
3、李龙,蒋奕晨,汪田鸿,金滔,张泉,田应仲. 一种面向环境感知的摩擦电-电磁复合流速检测装置. 202110697976.
4、李龙,翁文祥,汪田鸿,金滔,张泉,田应仲. 一种纸基摩擦电自供能多尺度人机交互装置. 202110700088.
5、李龙,杨佳辉,田应仲. 一种着陆缓冲机构的刚柔耦合动力学仿真方法. 202110841098.
6、李龙,仝经纬,汪田鸿,金滔,田应仲. 一种刚柔耦合的爪刺抓附装置. 202110775856.
7、李龙,陈禾炜,张泉,田应仲. 一种基于接近觉感知的机械臂避障方法. 202110632036.
8、李龙,谢风鸣,郝晴,汪田鸿,金滔,张泉,田应仲. 一种用于滚动关节连续体机械臂运动解耦的线缆驱动装置 . 202110523847.
9、李龙,蒋奕晨,田应仲,马培峰,金滔. 一种三管柔性执行机构诱导的管状爬行机器人. 202010710239.
10、李龙,汪田鸿,田应仲,金滔. 一种柔性缠绕机构. 201910810894.
11、金滔,李龙,汪田鸿,田应仲. 一种基于折纸原理的模块化软体驱动器. 202110764708.
12、金滔,李龙,田应仲. 一种自适应欠驱动机械手. 201910834268.8
13、金滔,田应仲,李龙. 一种基于柔性随形附着的钻探驱动机构. 201810527252.
14、易思成,李龙,张泉,陈豪,徐良,张丹,彭艳,蒲华燕,谢少荣,罗均. 一种形状记忆合金软体驱动器. 202110651966.
15、张泉,陈杰,李龙,彭艳,蒲华燕,罗均,谢少荣,田应仲,钟宋义. 一种基于柔性捕获机构的无人机布放回收装置 . 202011567593.
16、张泉,韩亚威,李龙,田英仲,金滔,胡慧娟. 一种基于摩擦电的智能运动感知安全带 . 202011154470.
17、田应仲,沈峰,金滔,汪田鸿,李龙. 一种基于折纸结构的软体爬行机器人. 202010859985.
18、田应仲,皇志慧,李龙. 一种用于血管介入手术的力反馈装置. 201811145365.
19、贾文川,王兴兴,蒲华燕,李龙. 一种电驱动小型仿生四足机器人. 201510273138.
20、贾文川,王兴兴,蒲华燕,罗均,李龙. 一种能够越障的变结构球形机器人. 201410254327.
▪ 成果展示
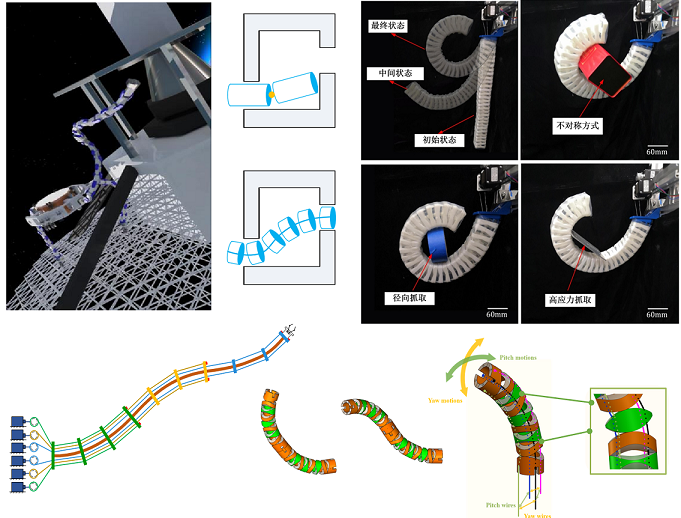
图1 多种柔性/软体机器人创新构型

图2 基于摩擦电感知的在轨组装机器人
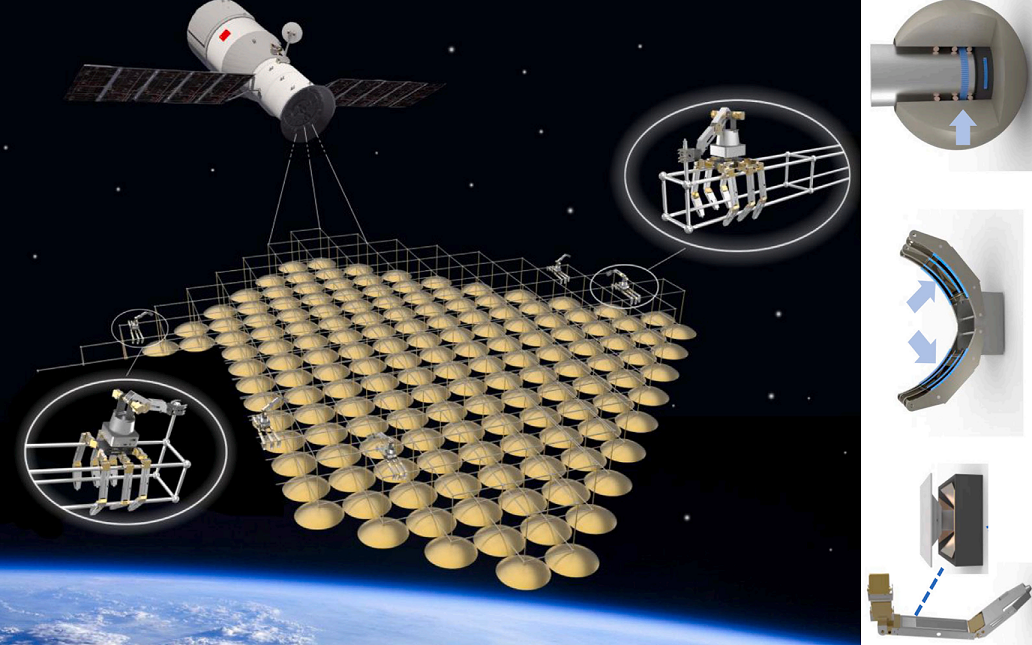
图3 基于摩擦电感知与机器学习的智能软体手爪
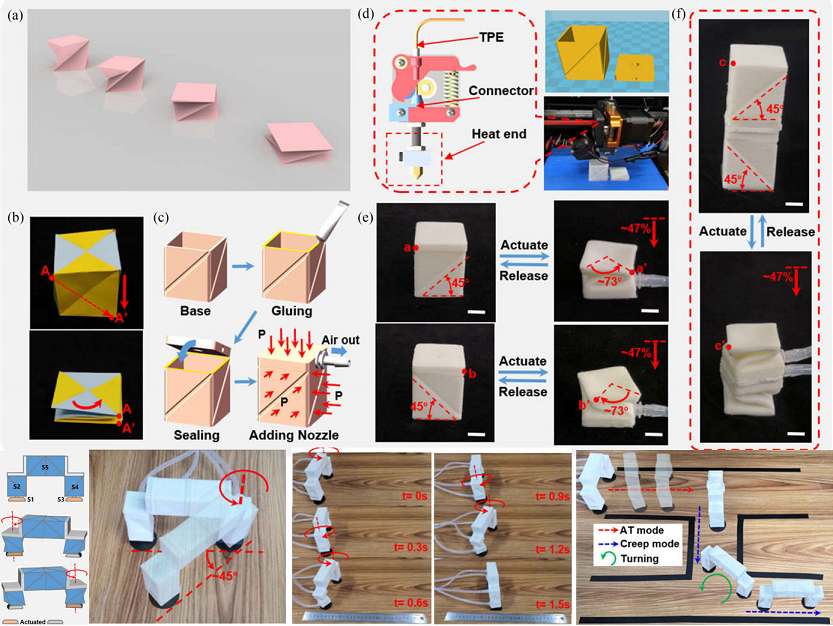
图4 基于柔性折纸的可重构机器人
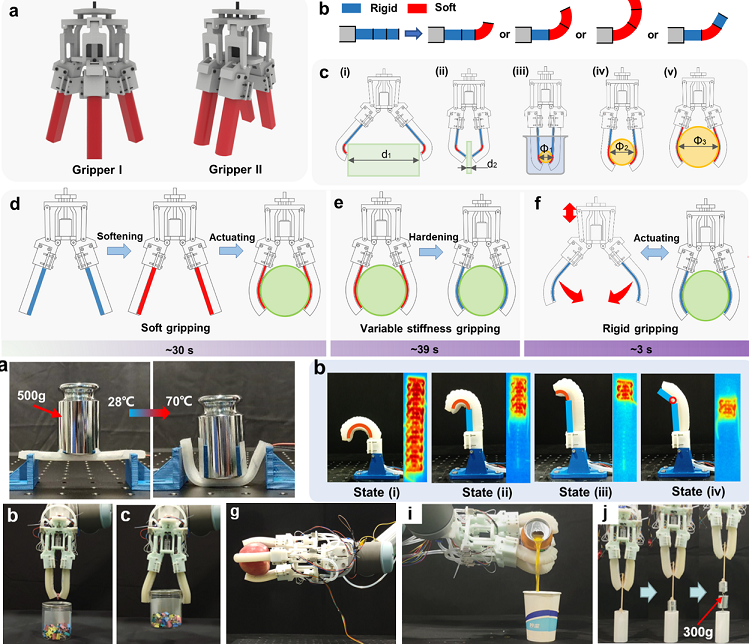
图5 基于热相变高适应变刚度软体手
l 代表性科研项目
1、国家自然科学基金面上项目:基于柔性自供能传感的连续体机器人形态与触觉感知方法研究,54万元,2023.01-2026.12.
1、国家国防科技工业局国防基础科研计划课题:XXX灵巧机械臂感知与控制技术,210万元,2021.01-2023.12.
2、上海航天控制技术研究所预研项目:基于线缆驱动的XX柔性臂,109万元,2020.05-2022.12.
3、上海市科委创新行动计划课题:高端连锁酒店搬运与客房助理机器人关键技术研发,135万元,2016.07-2019.12.
l 国际合作
1、与新加坡国立大学李正国教授团队在基于摩擦电的自供能感知方面开展全面紧密合作。

