窗体顶端
 王洁羽
王洁羽
副教授
机械自动化工程系
联系方式:jywang2021@shu.edu.cn
l 个人简介
王洁羽,1066vip威尼斯机自学院副教授
博士毕业于英国赫瑞瓦特大学,并于加拿大瑞尔森大学和北京航空航天大学从事博士后(卓越百人博士后)研究。主要从事变形机翼、折展机构及静平衡的研究;主持及参与国家自然科学基金青年基金项目1项;中国博士后基金面上项目1项;发表高水平论文20余篇;获发明专利7项。担任机器人与机构学重要学术会议Remar2021的track chair;担任机器人与机构学领域权威期刊Mechanism and Machine Theory、Transaction of the ASME- Journal of Mechanisms and Robotics等 8 期刊审稿人。
l 主要研究领域
1、变形机翼机构的设计
2、折展机构的构型综合
3、高效节能静平衡系统的设计
l 代表性成果
在《Mechanism and Machine Theory》、《Transaction of the ASME- Journal of Mechanical Engineering》、《Transaction of the ASME- Journal of Mechanisms and Robotics》等国内外学术期刊发表SCI/EI论文20余篇、获授权发明专利4项。
▪ 论文
1. Wang, J., Kong, X. and Yu, J., 2022. Design of deployable mechanisms based on Wren parallel mechanism units, Transactions of the ASME, Journal of Mechanical Design, 144(6), p. 063302.
2. Xi, F., Zhao, Y., Wang, J.* (通讯), Tian, Y., and Wang, W., 2021. Two actuation methods for a complete morphing system composed of a VGTM and a compliant parallel mechanism, Transactions of the ASME, Journal of Mechanisms and Robotics, 13(2), p. 021020.
3. Wang, J., Zhao, Y., Xi, F. and Tian, Y., 2020. Design and analysis of a configuration-based lengthwise morphing structure. Mechanism and Machine Theory, 147, p. 103767.
4. Wang, J. and Kong, X., 2019. A geometric approach to the static balancing of mechanisms constructed using spherical kinematic chain units. Mechanism and Machine Theory, 140, pp. 305-320.
5. Wang, J. and Kong, X., 2019. A novel method for constructing multimode deployable polyhedron mechanisms using symmetric spatial compositional units. Transactions of the ASME, Journal of Mechanisms and Robotics, 11(2), p. 020907.
6. Wang, J. and Kong, X., 2018. Deployable polyhedron mechanisms constructed by connecting spatial single-loop linkages of different types and/or in different sizes using S joints. Mechanism and Machine Theory, 124, pp. 211-225.
7. Wang, J. and Kong, X., 2018. Deployable mechanisms constructed by connecting orthogonal Bricard linkages, 8R or 10R single-loop linkages using S joints. Mechanism and Machine Theory, 120, pp. 178-191.
8. Wang, J., Yao, Y. and Kong, X., 2018. Reconfigurable tri-prism mobile robot with eight modes. Robotica, 36(10), pp. 1454-1476.
9. Wang, J., Yao, Y. and Kong, X., 2016. A rolling mechanism with two modes of planar and spherical linkages. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 230(12), pp. 2110-2123.
10. Wang, J., Zhao, Y. and Yu, J., 2021, Aug. A novel multi-mode spatial VGTM for morphing wings. In 2021 International Conference on Reconfigurable Mechanisms and Robots (ReMAR), IEEE, Toronto, p. 11.
11. Wang, J., and Xi, F., 2021, Aug. A morphing structure covered with panels inspired by fish scales. In 2021 International Conference on Reconfigurable Mechanisms and Robots (ReMAR), IEEE, Toronto, p. 38.
12. Wang, J. and Kong, X., 2020, Aug. An optimization method for static balancing of manipulators using springs. In ASME, International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), Virtual, p. 22217.
13. Wang, J., Bai, G. and Kong, X., 2017. Single-loop foldable 8R mechanisms with multiple modes. In New Trends in Mechanism and Machine Science, Springer International Publishing, Nantes, pp. 503-510.
▪ 成果展示
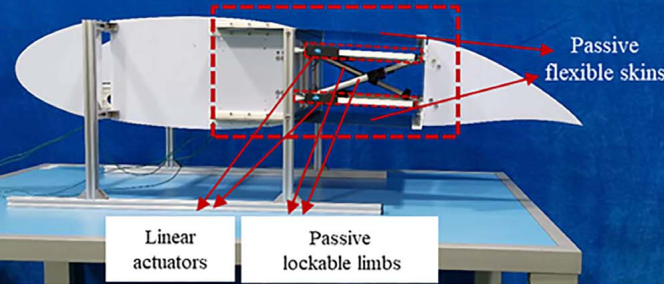
基于可变形桁架的变形机翼机构
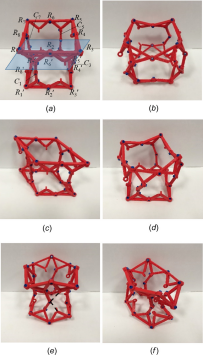

具有多模式的折展机构
l 科研项目
1、国家自然科学基金青年基金:高刚度轮廓连续变形机构的创新设计研究,2022.01-2024.12,主持;
2、中国博士后基金面上项目:基于少自由度并联机构的变形机翼的设计与分析,已结题,2019.11-2021.12 主持
l 国际合作
1、与英国赫瑞瓦特大学、加拿大瑞尔森大学保持紧密合作。

