窗体顶端

任彬
副教授,博导,省部级人才
联系方式:binren@i.shu.edu.cn
021-56331389 13916297236
l 个人简介
任彬,1066vip威尼斯副教授、博士生导师,省部级人才。现为上海市人工智能学会副秘书长。
重点开展人工智能、智能制造系统、并联机器人和人机交互技术等领域的研究工作。作为项目负责人主持国家自然科学基金-面上项目、国家自然科学基金-青年基金等6项国家及省部级项目。另外,作为主要研究人员参加并完成香港政府资助项目、国家重点基础研究发展计划(973计划)、国家863计划、国家科技重大专项、国家科技支撑计划等项目。
l 主要研究领域
1、人机协同、脑机交互、可穿戴设备
2、智能制造系统、人工智能算法
l 代表性成果
在《COMPUTER-AIDED CIVIL AND INFRASTRUCTURE ENGINEERING》、《JOURNAL OF COMPUTING AND INFORMATION SCIENCE IN ENGINEERING》等国内外学术期刊发表SCI/EI论文30余篇、获授权发明专利7项,出版专著2部。
▪ 论文
[1] Ren B. Luo XR. Li H. Chen JY. Wang Y. Gait trajectory-based interactive controller for lower limb exoskeletons for construction workers. COMPUTER-AIDED CIVIL AND INFRASTRUCTURE ENGINEERING. 2022.37(5): 558-572. (IF=11.775, JCR, Q1, 1/137)
[2] Ren B*.Pan YJ. Extracting and supplementing method for EEG signal in manufacturing workshop based on deep learning of time–frequency correlation. JOURNAL OF INTELLIGENT MANUFACTURING. 2022.19(8): 1-18. (IF=6.485, JCR, Q1, 25/139)
[3] Ren B. Luo XR. Chen JY. Single Leg Gait Tracking of Lower Limb Exoskeleton Based on Adaptive Iterative Learning Control. APPLIED SCIENCES-BASEL. 2019. 9(11): UNSP 2251. (IF=2.474, JCR, Q2, 32/91)
[4] Ren B*. Liu JW. Design of a Plantar Pressure Insole Measuring System Based on Modular Photoelectric Pressure Sensor Unit. Sensors. 2021. 21(11): 3789. (IF=3.427, JCR, Q1, 15/64)
[5] Ren B. Wang Y. Chen JY. Chen SL. A Novel Nonlinear Disturbance Observer Embedded Second-Order Finite Time Tracking-Based Controller for Robotic Manipulators. JOURNAL OF COMPUTING AND INFORMATION SCIENCE IN ENGINEERING. 2021. 21(6): 061005. (IF=1.431, JCR, Q3, 81/109)
▪ 获奖
获第32届华东地区优秀科技图书二等奖
▪ 知识产权
[1]任彬, 罗序荣. 基于混联机构的仿人型下肢外骨骼构型方法. (发明专利,已授权)
[2]任彬, 罗序荣. 基于自适应迭代学习的外骨骼单腿协同控制方法.(发明专利,已授权)
[3]任彬, 罗序荣. 基于RBF神经网络的踝关节步态预测方法. (发明专利,已授权)
[4]任彬,王耀. 基于自适应在线学习的上肢康复机器人控制方法.(发明专利,已授权)
[5]任彬,潘韫杰. 基于时频共融的多通道脑电信号通道选择方法(发明专利,已授权)
[6]任彬,王耀. 基于自适应神经网络滑模控制的多关节机器人控制方法(发明专利,已授权)
[7]任彬,王耀. 基于有限时间跟踪控制的协作机器人控制方法(发明专利,已授权)
▪ 著作
[1]任彬, 黄迪山.《机械动力学》上海科学技术出版.日期:2018年1月 ISBN 978-7-5478-3630-9/TH·85
[2]任彬. 《可穿戴下肢外骨骼人机协同设计与实验研究》(智能机电技术丛书). 上海科学技术出版社.出版日期:2020年4月 ISBN 978-7-5478-4795-4/TH·85
▪ 成果展示
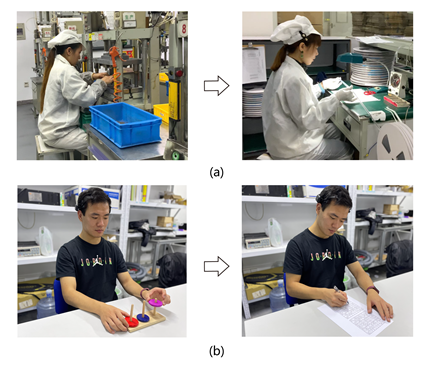
图1 实验示意图。(a)真实车间环境工人进行零部件装配,(b)再进行零部件的检验。

图2 第三代下肢外骨骼的实验测试
l 科研项目
1、国家自然科学基金委员会,面上项目,51775325,面向智能车间的脑-机交互理论、方法及其在风险预警中的应用研究,2018-01至2021-12,已结题,主持
2、国家自然科学基金委员会,青年基金,51205350,基于扩展域的设计与半实物仿真方 法及其在大型装备中的应用研究,2013-01至2015-12,已结题,主持
3、中国博士后科学基金会,第56批面上项目,2014M561753,极端服役环境下的注塑机合 模系统混合仿真技术研究,2014-07至2015-12,已结题,主持
4、浙江省科学技术厅,2013年度浙江省公益性技术应用研究计划项目,2013C31027,基于多域耦合与解耦 的精密塑料注射成型装备数字化设计关键技术研究,2013-07至2015-12,已结题,主持
5、浙江省人力资源和社会保障厅, 2012年度浙江省博士后科研项目一类资助,BSH1201019,多场综合的大型注塑装备 设计与混合仿真技术研究,2011-07至2013-05,已结题,主持
l 国际合作
1、与法国工程技术大学(Universités de Technologie, UT)、美国加州州立大学(California State University, Sacramento)保持紧密合作。
2、美国加州州立大学访问学者(2011)、法国工程技术大学访问教授(2017)。

