
杜亮
讲师,硕导
联系方式:邮箱du_liang@shu.edu.cn
l 个人简介
杜亮,1066vip威尼斯机自学院讲师、硕士生导师,上海市浦江人才,江苏省第十四批科技镇长团团员
从事机器人技术相关的研究,在机器人机构创新设计等方面取得系列成果:设计开发了托卡马克环形腔内窥机械臂、盾构机滚刀更换机械臂以及多款全地形移动机器人;主持及参与多项国家科技重大专项、自然科学基金及企业横向目;发表高水平论文6篇;获发明专利2项。
l 主要研究领域
1、机器人机构理论
2、自动化装备
l 代表性成果
在《Automation in Construction》、《IEEE Robotics and Automation Letters》等国内外学术期刊发表SCI/EI论文30余篇、获授权发明专利2项。
▪ 论文
1、Du, Liang; Yuan, Jianjun; Guan, Renming; Wan, Weiwei; "Robotic replacement for disc cutters in tunnel boring machines." Automation in Construction 140 (2022): 104369.
2、Du, Liang; Ma, Shugen; Tokuda, Keisuke; Tian, Yang; Li, Longchuan. "Bidirectional locomotion of soft inchworm crawler using dynamic gaits." Frontiers in Robotics and AI 9 (2022): 899850.
3、Wang, Miangyuan; Du, Liang; Yuan, Jianjun; Ma, Shugen; Bao, Sheng. "A bio-inspired continuum robot for out-pipe climbing and confined space navigating." 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2021.
4、Du, Liang; Zhang, Weijun; Yuan, Jianjun. "Design and experimental tests of an active cooling system for a kind of in-vessel inspection manipulator." Industrial Robot: the international journal of robotics research and application (2020).
5、Ma, Shugen; Du, Liang; Tsuchiya, Erina; Fuchimi, Mana; "Paper-Made Grippers for Soft Food Grasping", 2020 17th International Conference on Ubiquitous Robots (UR). IEEE, 2020.
▪ 获奖
获上海市“浦江人才”荣誉称号(2021),上海市领军(海外)人才(2021),苏州市第十四批科技镇长团优秀团员(2022)
▪ 知识产权
1、王明远,袁建军,杜亮,马书根,鲍晟,“一种连续体机器人驱动组件”,CN114012713A,2022-02-08.
2、 王仲健,乔正,杜亮,邓秀泉,“一种自动双线码垛机”,CN203064767U,2013-07-17.
▪ 成果展示
盾构机滚刀更换机器人(2019)
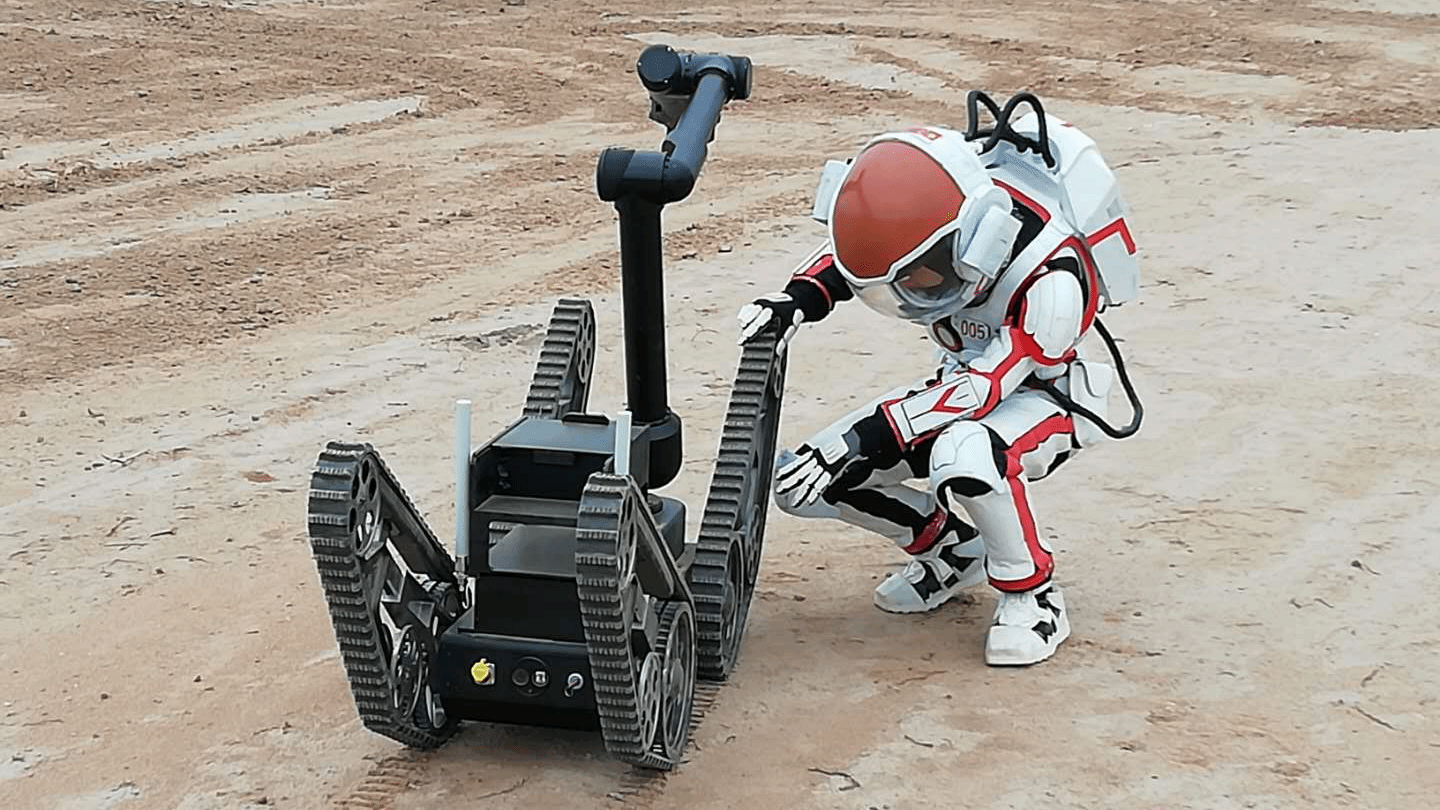
轮腿履结合移动机器人(2018)
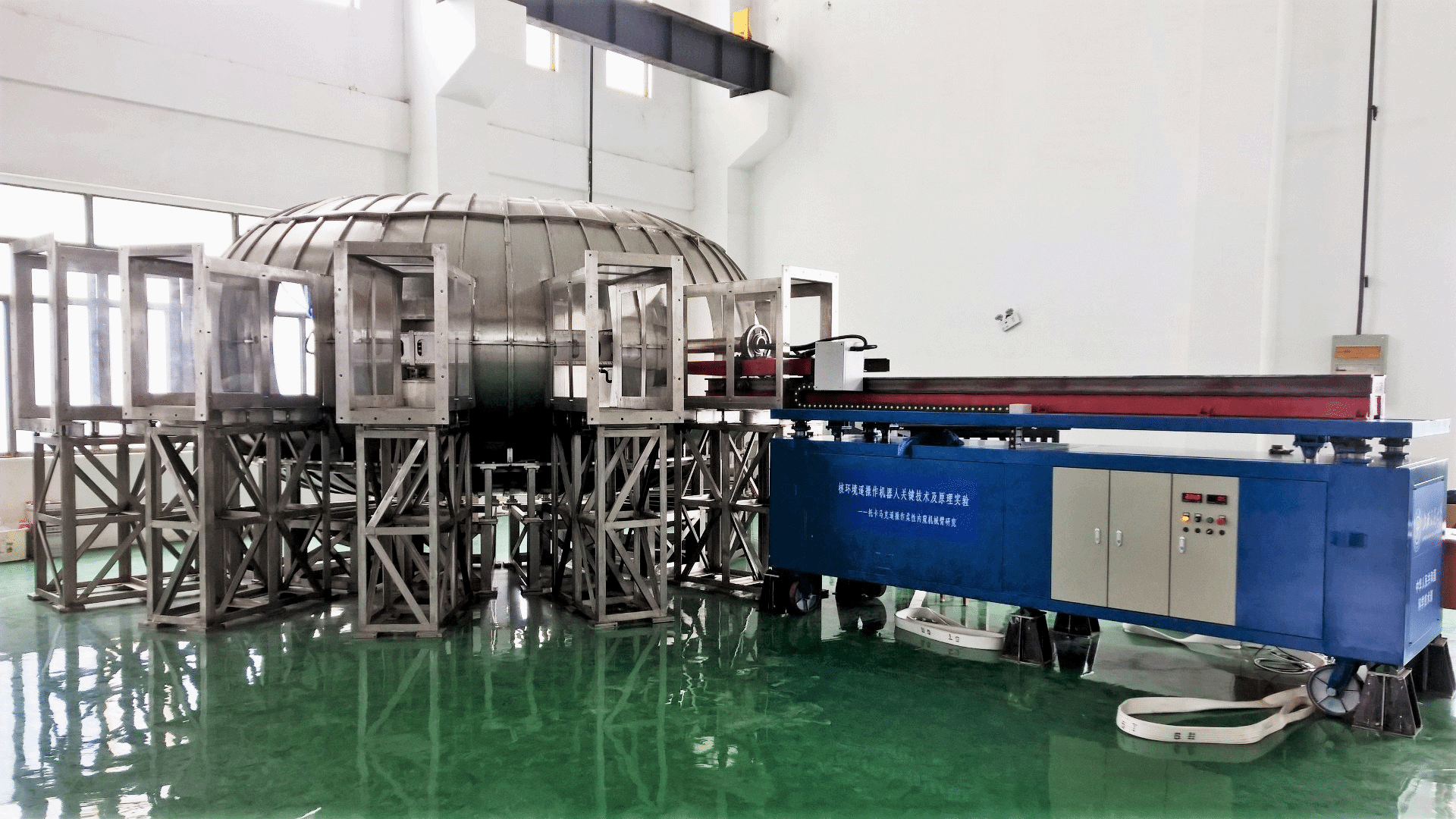
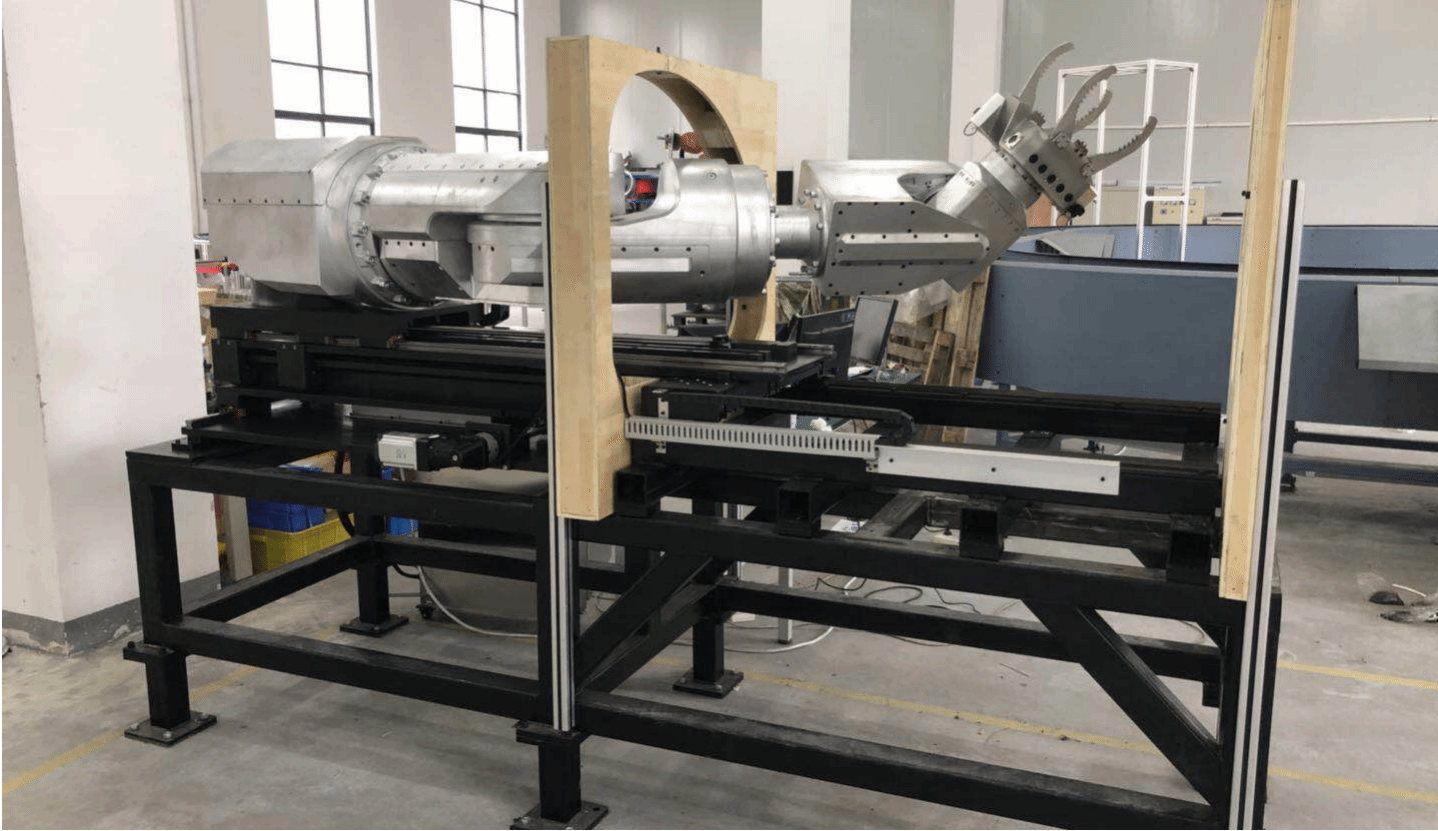
托卡马克环形腔内窥机械臂(2015)
l 科研项目
1、上海市“浦江人才”计划:具有并联非线性刚度软体手爪构型及抓取研究,2021.10-2023.9,主持;
2、博士后项目:基于新材料技术的机器人驱动技术研究,2019.4-2021.3,参与;
3、国家自然科学基金项目:面向托卡马克腔内维护作业的自铺轨道式机械臂宏动平台刚度优化及动态构型控制,2013.1-2017.12,参与;
4、科技部国际热核聚变实验堆(ITER)计划专项:托卡马克遥操作柔性内窥机械臂的研究,2012.1-2015.12,参与。
l 国际合作
1、与日本立命馆大学、大阪大学保持紧密合作。

