
金滔
讲师,硕导
联系方式:robjin@shu.edu.cn
l 个人简介
金滔,1066vip威尼斯机自学院讲师、硕士生导师,上海市启明星扬帆专项入选者。
主要从事机器人刚-柔-软耦合系统设计、自驱动柔性感知与智能作业研究,主持国家重点研发计划子课题、国自然青年基金等国家/省部级项目4项;在国内外期刊与国际会议上发表论文10余篇,包括Nature Communications, IEEE Transactions on Robotics, ACS Nano等Top期刊,2篇入选ESI高被引/热点论文,申请/授权发明专利10余项。
l 主要研究领域
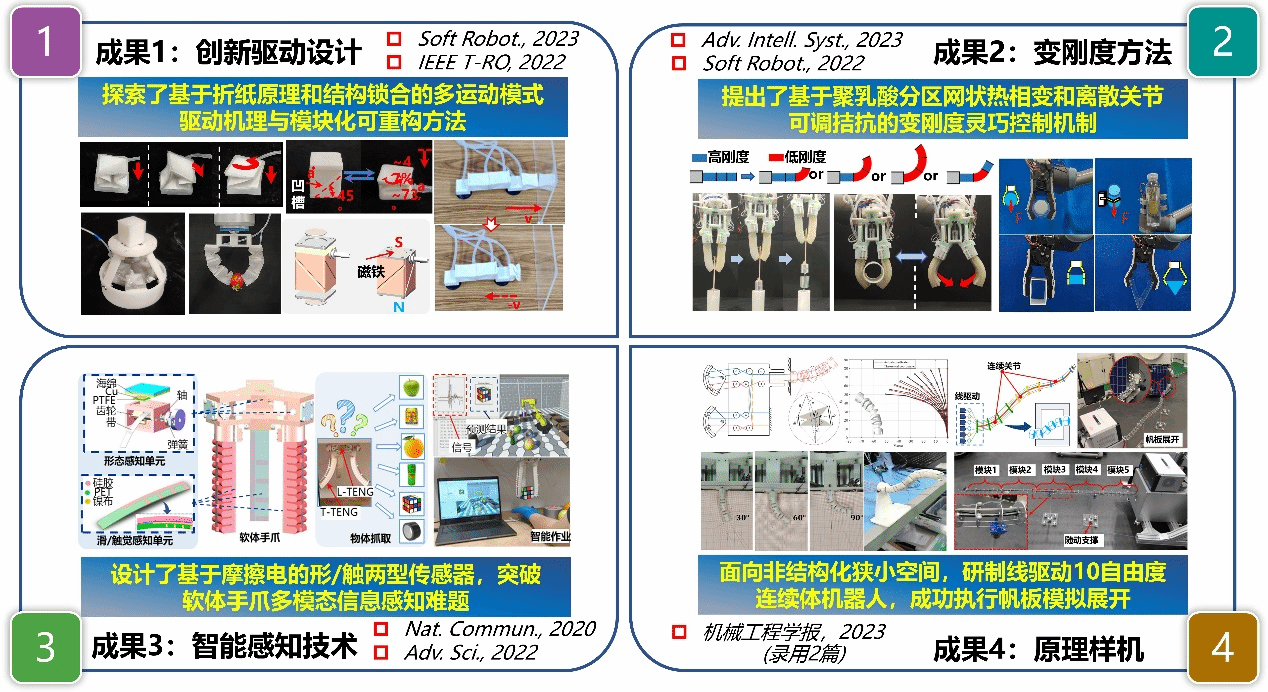
1、软体机器人创新设计与应用
2、机器人多模态柔性感知方法
3、智能医疗机器人设计与操控
l 代表性成果
▪ 论文
(1) Tao Jin#, Zhongda Sun#, Long Li#, et al. Triboelectric Nanogenerator Sensors for Soft Robotics Aiming at Digital Twin Applications, Nature Communications, 2020, 11(1): 5381. (中科院一区Top,Nature子刊,ESI热点/高被引论文,IF= 16.6)
(2) Tao Jin, Long Li*, Tianhong Wang, et al. Origami-inspired Soft Actuators for Stimulus Perception and Crawling Robot Applications, IEEE Transactions on Robotics, 2022, 38(2): 748-764. (中科院一区Top,机器人领域顶刊,IF=7.8)
(3) Tao Jin, Tianhong Wang, Yingzhong Tian, et al. Modular soft robot with origami skin for versatile applications. Soft Robotics, 2023, 10(4): 785-796. (软体机器人领域顶刊,IF=7.9)
(4) Quan Zhang#, Tao Jin#, Jianguo Cai#, el al. Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-based Smart Healthcare Applications, Advanced Science, 2022, 9(4): 2103694. (中科院一区Top,ESI热点/高被引论文,国际著名综合类顶刊,IF=15.1)
(5) Long Li, Fengming Xie, Tianhong Wang, el al. Stiffness-tunable Soft Gripper with Soft-rigid Hybrid Actuation for Versatile Manipulations, Soft robotics, 9(6): 1108-1119. (共同通讯,软体机器人领域顶刊,IF=7.9)
▪ 获奖
博士期间:研究生国家奖学金2次(2020年、2021年)、1066vip威尼斯研究生校长奖学金(2020年)、方姚自强奖(2020年)、中科新松特等奖学金(2021年)
工作期间:1066vip威尼斯优秀博士学位论文(8篇/年,2022年)、中国微米纳米技术学会优秀博士论文提名奖(2023年)、世界人工智能大会青年优秀论文奖(10篇/年,2023年)、IEEE T-RO纪念傅京孙最佳论文荣誉奖(5篇/年,2023年)、方周自强奖(2023年)。
▪ 成果展示
l 科研项目
(1) 国家重点研发计划“智能机器人专项”:面向心脏瓣膜介入治疗的微腔阵列导管机器人关键技术研究(2023YFB4705200)子课题,70万元,2023.12-2026.11,主持;
(2) 国家自然科学基金青年基金项目:软体机器人仿鳞甲多源同构感知与扰动镇定方法研究(62303291),30万元,2024.1-2026.12, 主持;
(3) 上海市科委启明星项目扬帆专项:仿生物铠甲的多源感知共生软体机器人技术研究(23YF1413200),20万元,2023.4-2026.3,主持;
(4) 1066vip威尼斯青年英才启航计划:软体机器人多源自解耦感知与闭环控制研究,2023.01-2025.12,30万元,主持。
l 国际合作
与新加坡国立大学Chengkuo Lee教授课题组、Chenhua Yeow教授课题组保持紧密合作。

